Относительная простота конструкции сочетается с высокой приспособляемостью к грунтам различной плотности за счет автоматического изменения шага навивки. При передаче вращательного движения и осевого усилия в зависимости от плотности грунта шаг спирали может увеличиваться или уменьшаться, чем плотнее грунт, тем меньше шаг, уменьшается срезаемый слой грунта, и меньше требуется вращающий момент. Треугольное сечение витков спирали и поперечин обеспечивают высокую жесткость конструкции в целом.
Рабочий орган землеройной машины, включающий в себя приводной вал и установленный на нем рабочий орган в виде фрезы с винтовой конической спиралью, закрепленной одним концом жестко с приводным валом, и имеющий способность сжиматься вдоль приводного вала, отличающийся тем, что винтовая коническая спираль выполнена в сечении витка в виде неравнобедренного треугольника, вершина которого является режущей кромкой и соединена с валом, по меньшей мере, двумя на виток спирали поперечинами такого же сечения, серповидной формы, жестко соединенными со спиралью и втулками, свободно установленными на приводной вал квадратного сечения.
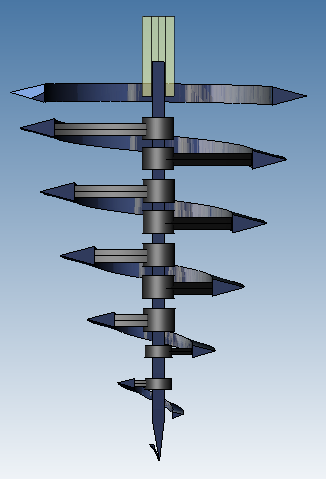
ФИГ. 1. 3D-модель «Рабочий орган землеройной машины» Главный вид (сечение).
Можно рассматривать, как этап в создании робототехники нового типа, обладающей конструктивными особенностями, обеспечивающими самоадаптацию и саморегулирование, например, в отношении рабочей среды без внесения дополнительных систем управления и регулирования в широком диапазоне режимов, что особенно актуально для эффективного использования таких устройств во внеземных условиях. Это создает определенные требования в создании действующих моделей для возможно полного изучения «поведения» (рабочих характеристик) такого типа конструкций, их оптимизацию и создание белее совершенных моделей и также эффективного использования в условиях планеты Земля.
3-D модели выполнены конструкторами МКБ МАМИ при содействии НП «ЦРП ВАО г. Москвы».
Авторы: Винник А.Ф., инженер-механик; Винник М.М., инженер-механик; Москва, Россия
Координаты для связи: vin_nik@mail.ru
Источники:
1. Патент на изобретение № 2203363 РФ; Рабочий орган землеройной машины; Винник А.Ф., Винник М.М.; ЗАО “Сельмашпроект”; 09.01.2001; опубл. 27.04.2001, Бюл. № 12.
2. Отчет «Разработка виртуальной модели Рабочий орган землеройной машины». МГТУ «МАМИ» (МКБ), 03.12.2007 (не опубл.).

ФИГ. 2. Рабочий орган землеройной машины
THE WORKING MEMBER OF EARTHMOVER
Author: Vinnik A.F., mechanical engineer; Vinnik M.M., mechanical engineer; Moscow, Russia
Keywords: mechanical enginосвоениеeering, agriculture, self regulation, space exploration, double helix, model
технопарк ® 42 МКТУ: исследования в области механики
Просмотров: 1215
1 comment on “Рабочий орган землеройной машины”