Изобретение относится к землеройным машинам, в частности к рабочему оборудованию одноковшовых гидравлических экскаваторов. Цель – улучшение процессов копания и увеличение производительности экскаватора за счет изменения угла установки ковша и его перестановки в положения прямой и обратной лопат.
На чертеже (Фиг. 1) изображена схема рабочего оборудования экскаватора при перестановке ковша из положения прямой лопаты (А) в положение обратной лопаты (В) [1].
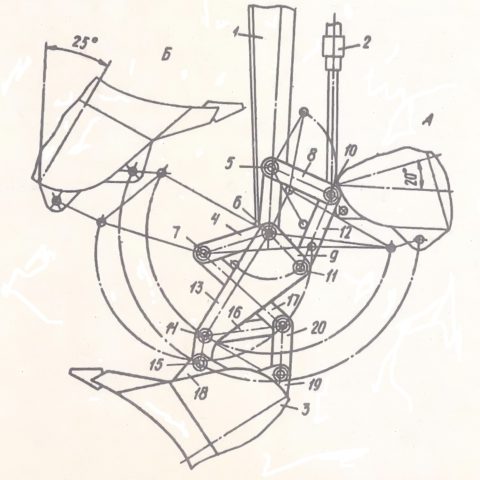
Фиг. 1. Схема рабочего оборудования экскаватора при перестановке ковша из положения прямой лопаты (А) в положение обратной лопаты (В) [1].
Рабочее оборудование содержит рукоять 1, гидроцилиндр 2 управления, ковш 3 с двумя режущими кромками.
На рукояти жестко закреплен угловой рычаг 4 с шарнирами 5-7. Шарнир 5 углового рычага и его центральный шарнир 6 соединены соответственно с ведущим 8 и ведомым 9 коромыслами, свободные концы которых шарнирами 10 и 11 соединены с шатуном 12, образуя двухкоромысловый четырехзвенник.
К сочленению ведущего коромысла 8 и шатуна 12 присоединен шток гидроцилиндра 2 управления. Ведомое коромысло 9 выполнено в виде двухконсольного рычага, одна консоль которого шарниром 11 соединена с шатуном 12, а вторая консоль 13 ведомого коромысла имеет два шарнира 14 и 15. Шарниром 14 консоль 13 соединена с дополнительным шатуном 16 и коромыслом 17, второй конец которого присоединен к шарниру 7 углового рычага 4. Образованный из этих элементов второй шарнирный четырехзвенник выполнен в виде приближенно-направляющего механизма. Концевой шарнир 15 второй консоли ведомого коромысла 9 соединен с передней проушиной 18 ковша 3, а его задняя проушина 19 шарнирно соединена с рычагом 20, свободный конец которого также шарнирно соединен с сочленением дополнительного шатуна 16 с дополнительным коромыслом 17.
Перестановка ковша из положения прямой лопаты в положение обратной лопаты осуществляется следующим образом:
При движении штока гидроцилиндра 2 управления ковшом 3 через коромысло 8 и шатун 12 осуществляется поворот ведомого коромысла 9 относительно рукояти 1 и углового рычага 4. При этом приближенно-направляющий механизм осуществляет плоскопараллельное перемещение шатуна 16 и обеспечивает смещение рычага 20 и поворот ковша 3 в шарнире передней проушины 18, т.е. поворот ковша относительно второй консоли 13 ведомого коромысла 9.
При построении 3D модели (Фиг. 2) использованы следующие обозначения: гидравлический цилиндр управления – 1, угловой рычаг – 4, 11, шарниры – 2-8, коромысла – 9, 12, шатун – 13, ковш – 10. При помощи шарниров 2-8, скрепленных с коромыслами 9, 14 с шатунами 12, 13, рычагом 4, 11, ковшом 10 между собой, угол ковша может изменяться в положения прямой и обратной лопат, что улучшает производительность экскаватора.

Фиг. 2. Модель “Рабочее оборудование одноковшового экскаватора”
Перестановка ковша из положения прямой лопаты в положение обратной лопаты осуществляется следующим образом: при движении штока гидроцилиндра 2 управления ковшом 10 через коромысло 9 и шатун 13 осуществляется поворот ведомого коромысла 14 относительно рукоятки (которая скрепляет данное приспособление с экскаватором) и углового рычага 4. При этом приближенно-направляющий механизм осуществляет плоскопараллельное перемещение шатуна 12 и рычага 11 и поворот ковша 10 соответственно в шарнире передней проушины, т.е. поворот ковша относительно второй консоли ведомого коромысла 14.
На Фиг. 3 показана работа ковша в положениях прямой и обратной лопат.
Фиг. 3. Работа ковша.
3D-модели выполнены студентами Московского Политеха при содействии авторов патента.
Авторы реферата:
Строков Павел Игоревич, ст. преподаватель, Московский Политех,
Королёв Николай Олегович,
Морозов Даниил Андреевич,
Шодиев Фирдавс Махмадюсуфович,
Ильхомов Бекзод Бунёд угли,
студенты 2 курса, Московский Политех; Москва, Россия
Координаты для связи: mail@vinnik.ru
Источник:
-
А.с. № 1408023; Рабочее оборудование одноковшового экскаватора; Винник А.Ф., Винник М.М., Кусков А.А., Михеев А.И.; ЗАВОД-ВТУЗ при Карагандинском металлургическом комбинате; 02.07.1986; 07.07.1988. Бюл. № 25
Ключевые слова: прямая лопата, обратная лопата, экскаватор, производительность
Working equipment of a single-bucket excavator
Authors: Korolev N. O., Morozov D. A., Shodiev F.M., Ilkhomov B.B.,
2nd year students of Moscow Polytechnic University; Moscow, Russia
Keywords: single-bucket, excavator, productivity, back excavators, power shovel
технопарк ® 42 МКТУ: исследования в области механики
Просмотров: 1117